
Accueil L'association La photo du mois Reportage Souricette Mini-bulle Souris-bi Souris-bulle Michel Barry Le Mag Archives

Les constructeurs de Souricette doivent souvent rechercher eux-mêmes le GMP de leur
appareil. Le choix de lhélice est difficile et doit être dégrossi seulement à partir de ses données
géométriques (forme en plan de la pale, diamètre et pas) ou grâce à lexpérience en vol.
Une technique venue du paramoteur, dont est issue une bonne partie de nos petits moteurs,
consiste à mesurer la traction du GMP au point fixe de façon à sélectionner lhélice qui tire le plus
sur un moteur donné. Si cette technique est parfaitement applicable aux paramoteurs lents car leur
vitesse davancement est faible par rapport à la vitesse de rotation de lhélice qui travaille toujours
ou presque à la même incidence, en revanche pour la souricette lécart de vitesse (0 à 30 m/s)
produit des variations dincidence qui rendent lhélice la plus « tractive » au point fixe
complètement inefficace au fur et à mesure que la vitesse augmente.
Doù la nécessité de comprendre comment une hélice fonctionne.
Une aile qui tourne
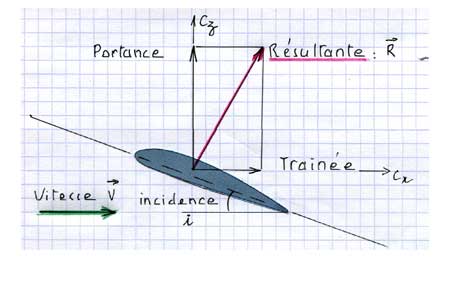
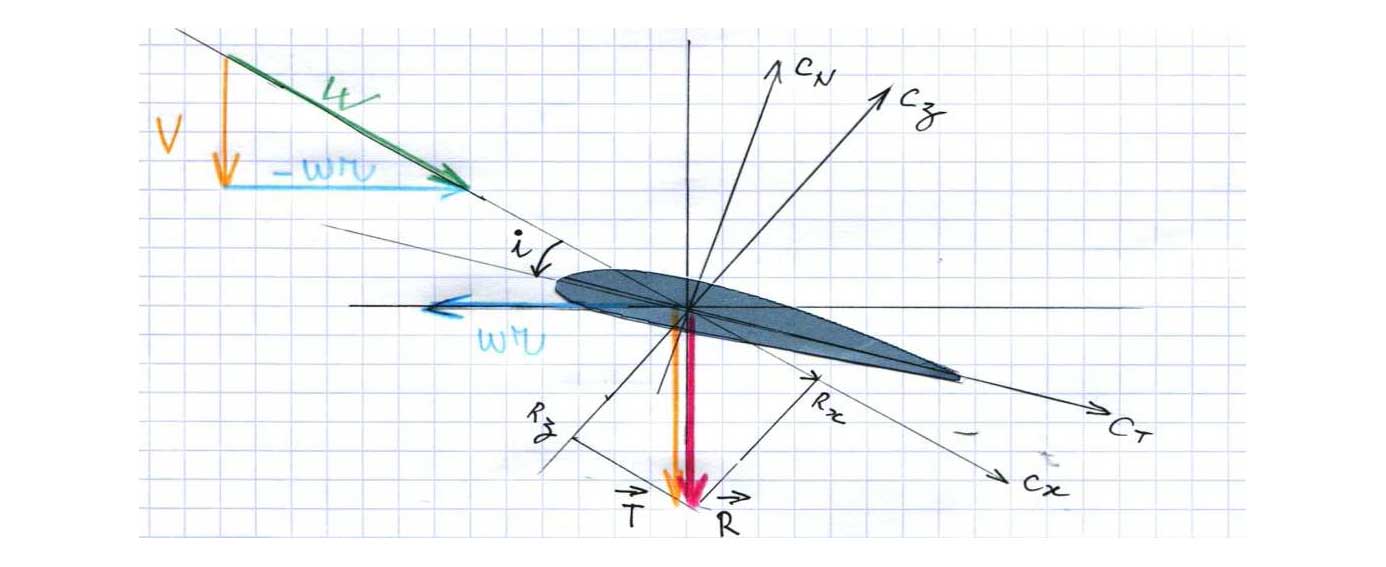
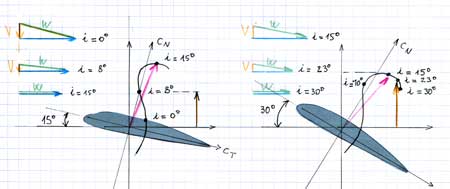
On retrouve les forces connues de laile davion (traînée, portance en repère dEIFFEL).
Elles sont la décomposition de la résultante aérodynamique R dans un repère lié à la vitesse de
lavion (Cx, Cz).
Pour létude de lhélice il faut introduire un autre repère pour la même résultante
puisque les composantes qui nous intéressent sont liées :
· A la traction de la pale dans le sens de lavancement de lavion (force utile)
· A la force qui soppose, à la rotation, celle qui consomme la puissance (force
nuisible)
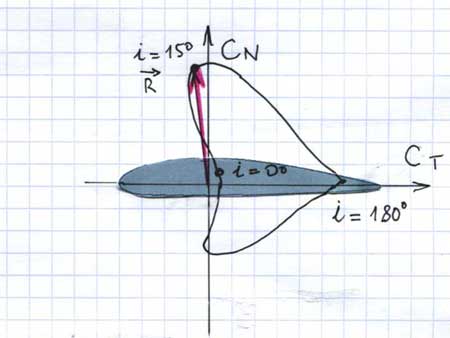
Doù lutilité dintroduire un autre repère, tournant et associé au profil : le repère de LILIENTHAL.
Dans les 2 cas la résultante R est identique mais sa décomposition est différente
Les deux repères traditionnels de lAérodynamique et de la Mécanique du Vol
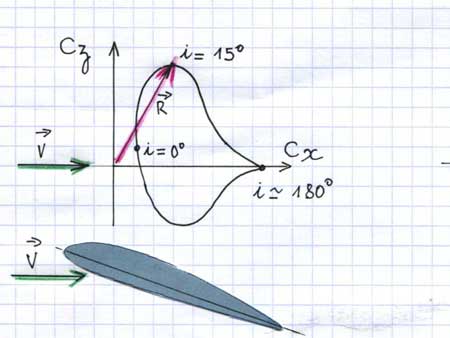
La décomposition de la résultante R se fait en Cz, Cx, repère dEIFFEL associé à la vitesse ou
en Cn, Ct, repère de LILIENTHAL associé (attaché) au profil.
Ces deux repères sont nécessaires pour bien comprendre la gymnastique de la projection de R selon la force que lon veut analyser.
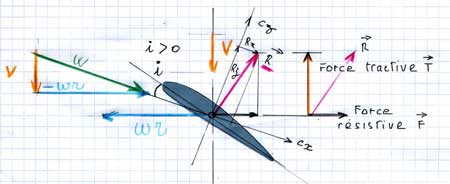
les triangles:
.des vitesses
.des forces

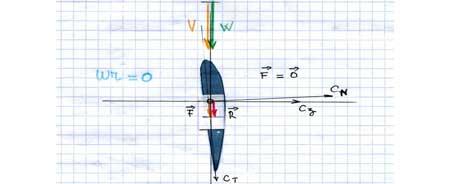
Pour simuler lavion privé de propulsion on veut « T = 0 ».
Ceci est possible vers les incidences voisines de zéro. La traînée et la portance ne sont pas nulles (repères dEiffel et de Lilienthal quasiment confondus). La pale rencontre une résistance F qui se confond avec R car
aucune force ne doit apparaître sur laxe davancement de lavion.
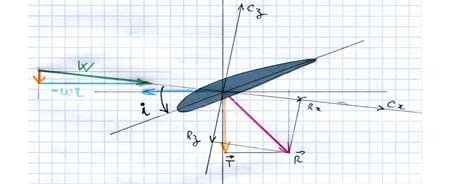
Quand le régime de transparence est appliqué il doit être adapté à V car il varie avec la
vitesse de lavion. Il est déterminé en vol par le constructeur. Pour ce on ajuste le régime (ω) pour
obtenir le triangle des vitesses qui donne W aligné avec la corde de référence du profil.
Contrairement à une idée répandue la transparence consomme de lénergie car le moteur
développe une puissance non-nulle pour vaincre R. Ce nest pas le moulinet du § 6. !
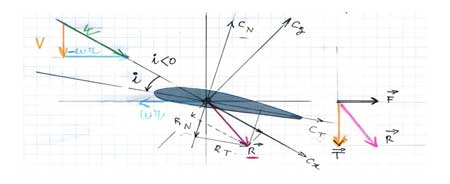
Lincidence est négative. Dans les 2 repères on voit que la force tractive T est négative (dirigée vers larrière de lavion). Le moteur consomme de la puissance car F soppose à sa rotation. En général ce cas est rencontré non-intentionnellement :
Le plus paradoxal des fonctionnements de lhélice : aucun couple résistif sur larbre du
moteur, lhélice tourne librement.
Elle a accéléré car la composante en Ct (repère de Lilienthal) était négative et entraînait ou « aspirait » la pale vers lavant du profil.
Quand «ωr » est devenu suffisant T sest alignée avec R et la rotation sest entretenue (cas dun rotor dautogire ou dhélicoptère en autorotation).
En moulinet la force qui soppose à lavancement de lavion peut être très grande (parfois
bien plus importante que la traction normale). De plus le sillage de lhélice en moulinet est
comparable à celui dun disque de même diamètre ce qui peut nuire gravement à lalimentation des
gouvernes de vol des empennages et conduire à des pertes de contrôle ;
Enfin si aucun frein mécanique nexiste sur larbre la vitesse de rotation peut être très
importante et engendrer la destruction des attaches de lhélice ou du GMP.
On demande à lhélice arrêtée de produire le moins de traînée possible. En effet on cherche à la passer en drapeau car le moteur est en panne ou doit impérativement être arrêté. Le drapeau a une double fonction :
La pale fonctionne avec des incidences négatives et produit à basse vitesse de lavion une force tractive T dirigée vers larrière de lavion. Il suffit de rendre le calage négatif pour que lhélice mue par le moteur produise T négatif. Le fonctionnement en reverse est comparable au fonctionnement en frein. Seule différence : le fonctionnement en reverse doit produire une force de freinage à très basse vitesse V ce qui nécessite dinverser le calage alors quil peut y avoir effet-frein pour des calages positifs à grande vitesse.
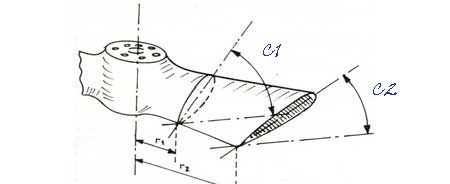
Lhélice à cale fixe (parfois dite à « pas constant ») est définie à chaque rayon par le calage C ou angle entre la corde de référence du profil et le plan de rotation.
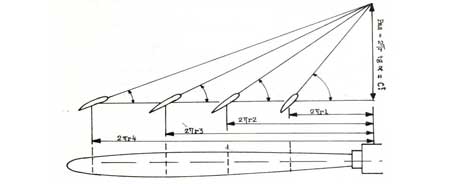
Lhélice idéale, au sens géométrique du terme est celle dont chaque section de la pale qui
progresserait dans lair dans le sens de la corde de référence (incidence zéro) avancerait dune
valeur identique qui vaut 2πr. tg C
La valeur 2ωr. tg C sappelle le pas, un peu comme le pas dune vis qui progresse dun tour
complet. Plus on se rapproche du centre plus le calage C doit être grand car r diminue.
On peut admettre quen transparence cette condition est à peu près réalisée.
Si lavion avance moins que la valeur du pas lhélice tractionne (fonctionnement normal)
Si lavion avance davantage que la valeur du pas lhélice freine. (frein ou reverse)
Sur la plupart des hélices le pas nest pas exactement le même à chaque valeur du rayon ce
qui nécessite de préciser à quel rayon on le mesure (par exemple pas à 0,50 r ou pas à 0,75 r) de
façon à pouvoir comparer les hélices et les caractériser dune façon non-ambigüe.
Vue en bout la variation du calage présente à loeil une surface vrillée. On appelle
« vrillage » la différence de calage entre deux sections données. Par exemple : le vrillage de 0,1 r à
0,8 r vaut 11°.
Le vrillage fait partie du savoir-faire de lhélicier. En effet le vrillage idéal (2πr. tg C =
constante) ne donne pas le meilleur rendement car les écoulements de lair autour de lhélice
sont plus compliqués que ceux décrits simplement par le triangle des vitesses.
Pour simplifier on envisage le fonctionnement du même tronçon situé à une distance r du centre de lhélice.
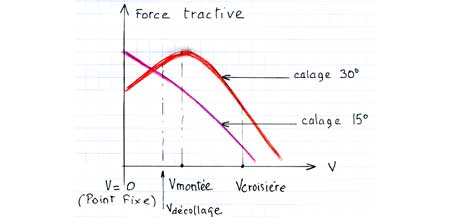
Les courbes de traction en fonction de la vitesse pour le même tronçon dhélice calé différemment (15° ou 30°) permettent de comprendre la notion dadaptation à la vitesse de laéronef
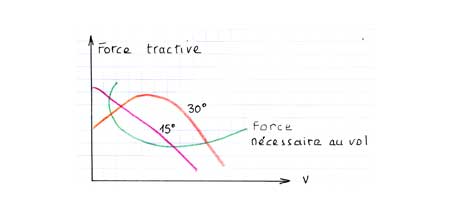
En superposant la force nécessaire pour propulser un appareil à différentes vitesses (sa
traînée aérodynamique) on comprend mieux comment on peut choisir le calage (ou le pas) de
lhélice.
Attention les courbes dhélice sont tracées à un régime fixe. Mais quand on sait que la vitesse de
lavion interfère sur le régime moteur il faudrait plutôt utiliser les courbes de traction du GMP avec
le dispositif de puissance (boisseau du carburateur par exemple) dans une position fixe. Par exemple
à pleine ouverture. Les courbes dhélice seraient bien différentes mais le principe de la méthode
dadaptation resterait identique.
Le propos de ce rapide exposé avait pour seule ambition de vous convaincre à renoncer à choisir
votre hélice grâce à lessai dynamométrique propre aux paramoteurs et qui leur est parfaitement
adapté.
Des prototypes davion ou dULM ont fait des premiers vols difficiles à cause de ce choix et
des accidents dus à des hélices inadaptées parce que choisies selon ce critère ont fait des victimes.
Le choix de son hélice est difficile et doit obéir à des informations type « banque de données »
car aucun calcul scientifique ne sera assez renseigné pour déterminer demblée la meilleure hélice.
Seul le pas qui est directement lié au régime de rotation du moteur et à la vitesse présumée du futur
avion peut être dégrossi en estimant la transparence et en laugmentant légèrement du
« glissement ».
A confier à des pros de lhélice exclusivement car il faut aussi estimer le diamètre et
la forme de la pale
PS : cet article de Michel BARRY a été publié dans le Bulletin Air Souris Set N° 59 ( novembre 2011)